Welcome to my technical portfolio. I am Tri Knight, a Robotics Researcher specializing in AI-driven solutions for autonomous systems, including imitation learning, motion planning, perception, and simulation. With over 12 years of experience in robotics engineering, I have contributed to both industrial and academic research environments.
I have worked as a Robotics Software Engineer at Sereact (Stuttgart, Germany) and HiveBotics (Singapore), where I was a core member of the engineering teams developing advanced control algorithms and functional prototypes that supported successful Series A fundraising. Previously, I served as a Robotics Lab Engineer at the Vietnamese-German University.
In addition, I have also contributed to various projects for leading companies including Robert Bosch, Pepperl+Fuchs, and Mercedes-Benz.
I graduated in 2017 from Karlsruhe University of Applied Sciences with a Master's in Mechatronics and Sensor Systems Technology. With a strong passion for the robotics field, I have worked on researching and doing several robotics projects, which are displayed here.
Core Responsibilities
- System Design: Architect robotics software systems using tools like ROS/ROS2, Gazebo, and IsaacSim.
- Algorithm Development: Develop and optimize algorithms for Imitation Learning (ACT, Diffusion), motion planning (e.g., RRT), inverse kinematics, perception (SLAM), and control.
- Simulation & Testing: Configure Simulation environments/Digital Twin to validate robotics behavior and performance.
- Integration: Interface hardware with industrial robots: UR, Unitree (Humanoid H1, GO2), Yaskawa, Fanuc, Franka, UFactory,.. and components (sensors, actuators) with middleware such as ROS/ROS 2.
- Troubleshooting & Optimization: Diagnose and resolve issues in robotics software stacks to improve efficiency and stability.
Research experiences
ROS based Digital Twin Framework for Collaboration Robot
Tri Bien Minh*, Phu Do, Hung Q. Nguyen, Khang H. V. Nguyen, Thao T.T Phan - Proceedings of the International Conference on Sustainable Energy Technologies
This paper presents a real-time machine health monitoring digital twin (DT) framework for robot machine-tending applications based on ISO 23247. The framework utilizes OPC UA for communication and ROS for data exchange between components. It consists of a physical space with robotic hardware and a cyberspace DT layer with three main entities for data collection, edge computing, and user interaction.
Spinger Link, Preprint , Code

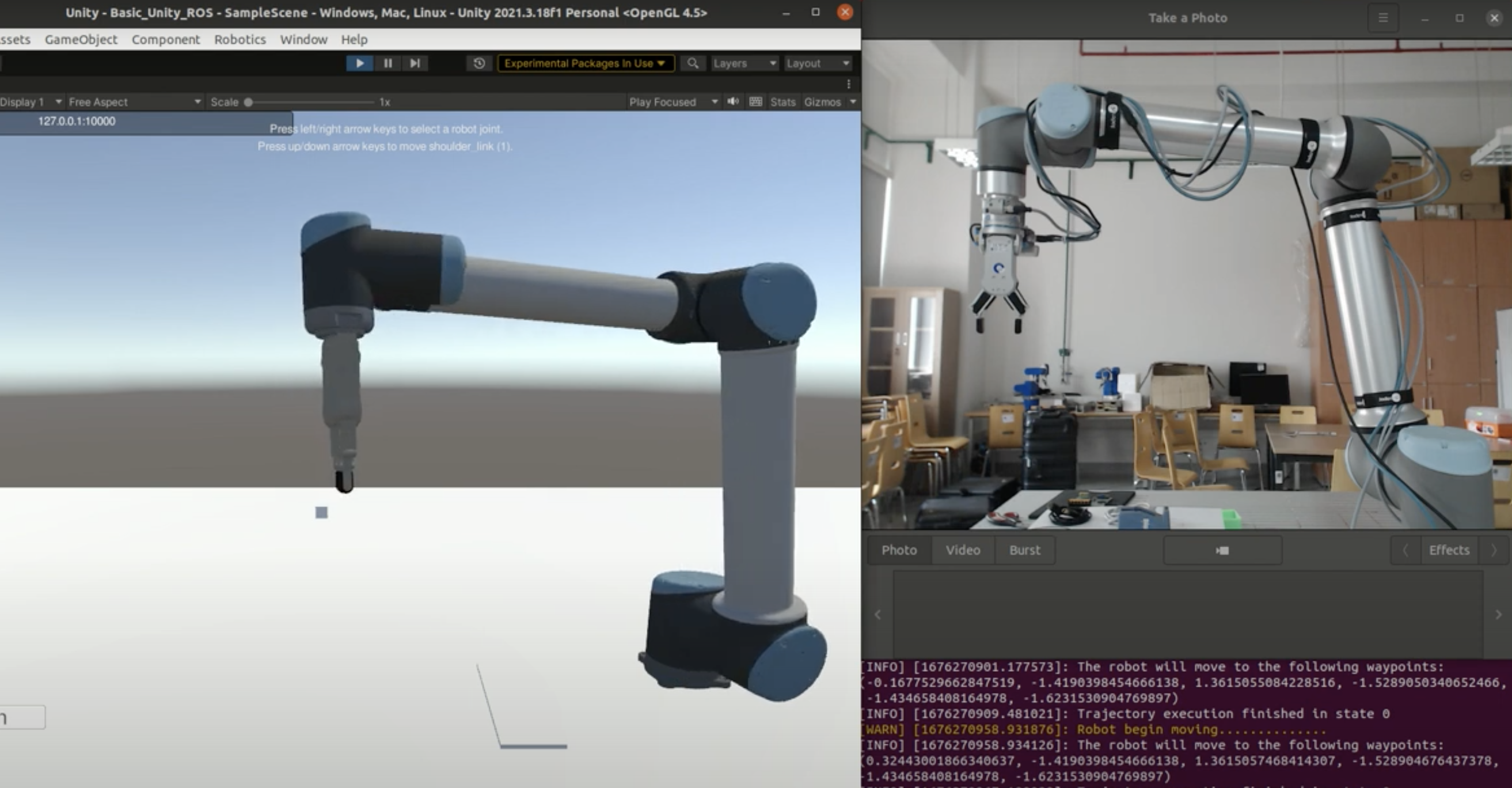
Position-based Visual Servoing with Dual Manipulators
The research focuses on designing a system for position-based visual servoing (PBVS) with dual 6-Degree of Freedom (DoF) UR10e robots. The main robot uses computer vision integrated position-based servoing algorithm for tracking the ARTag trajectories from another robot by using
Realsense D435 camera. The result of this algorithm is joint velocity control on the real UR10e
robot, which helps the main robot simultaneously track the ARTag trajectories in real time.
Video ,
PrePrint
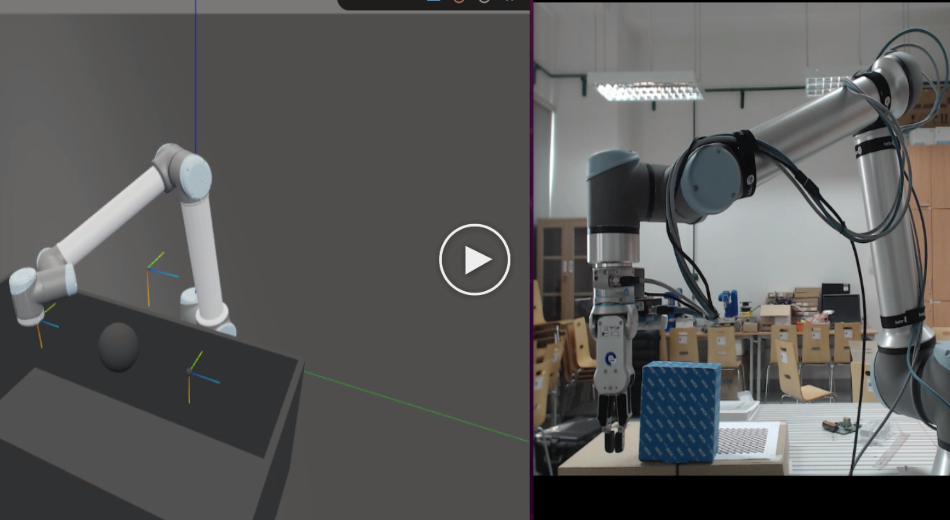
Optimisation Algorithm for Reactive Motion Control Manipulator
The research focuses on designing an Optimization algorithm for reactive motion
controller manipulators which can avoid static and dynamic
obstacles while moving to the desired end-effector pose. This work is based on a paper: "NEO: A Novel Expeditious Optimisation Algorithm
for Reactive Motion Control of Manipulators" and the book "Learning for Adaptive and Reactive Robot Control".
Video

LiDAR-based Vehicle Detection by using DBSCAN Unsupervised Clustering approach
Tri Bien Minh*, Hien Vo Bich - 2023 6th International Conference on Control, Robotics and Informatics (ICCRI 2023) www.iccri.org.
This research aims to develop a lidar-based vehicle detection system in a complicated roadway area through an embedded system.
In order to achieve this, a low-power, high-performance embedded GPU (Nvidia JetsonTX2) with support for deep neural networks running concurrently and the application of an unsupervised learning DBSCAN algorithm for point cloud recognition has been chosen.
Video, Preprint.

Robot Gesture Control Using Online Feedback Data with Multi-Tracking Capture System.
Khang Hoang Vinh Nguyen, Tri Bien Minh , Van Chi Le and Phu Xuan Do - The 7th International Conference on Advanced Engineering - Theory and Applications, pp. 121-130, AETA 2022.
This study uses a Vicon system, a high-speed accurate marker-based motion capture system aiming to develop a wireless low-latency gesture control method that requires no hardware development and no on-board power source. A novel control is designed to track a rigid-body object’s motion in the work- space and translate it to robot control signals. The system has five main compo- nents: a host PC with a Vicon software named Tracker, a set of eight Vicon Van- tage V8 infrared cameras, a client PC that receives Tracker’s broadcasted data over the Ethernet, a robot model named youBot provided by KUKA, and a rigid- body object that will act as the gesture controller.
Video, Preprint.
MiniRos: an autonomous UGV robot for education and research
Tri Bien Minh*; Hua Thanh Luan; Do Xuan Phu; Tran Quang Nhu; Bui Minh Duong - International Conference on System Science and Engineering (ICSSE), 2021, pp. 170-175, DOI: 10.1109/ICSSE52999.2021.9538463.
MiniRos is a small autonomous UGV-Unmanned ground vehicle developed for education and research purposes. In this paper, we develop MiniRos with a kinematic skid-steering, high torque and compact structure drive system that can take research to the outdoor environment. MiniRos is run on a Robot Operating System (ROS), which has been developed to be compatible with standard robotics programming environments. The robot can build a 2D map with various SLAM algorithms such as Karto SLAM, Gmapping, Hector SLAM, and navigation in the built map.
Video, Preprint, Code.
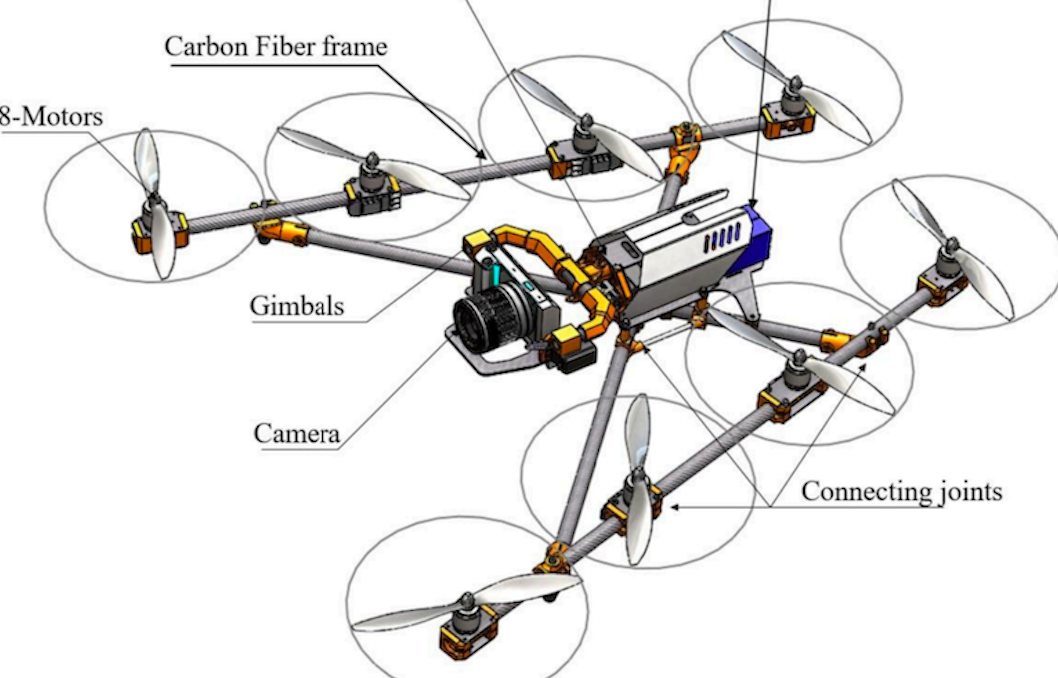
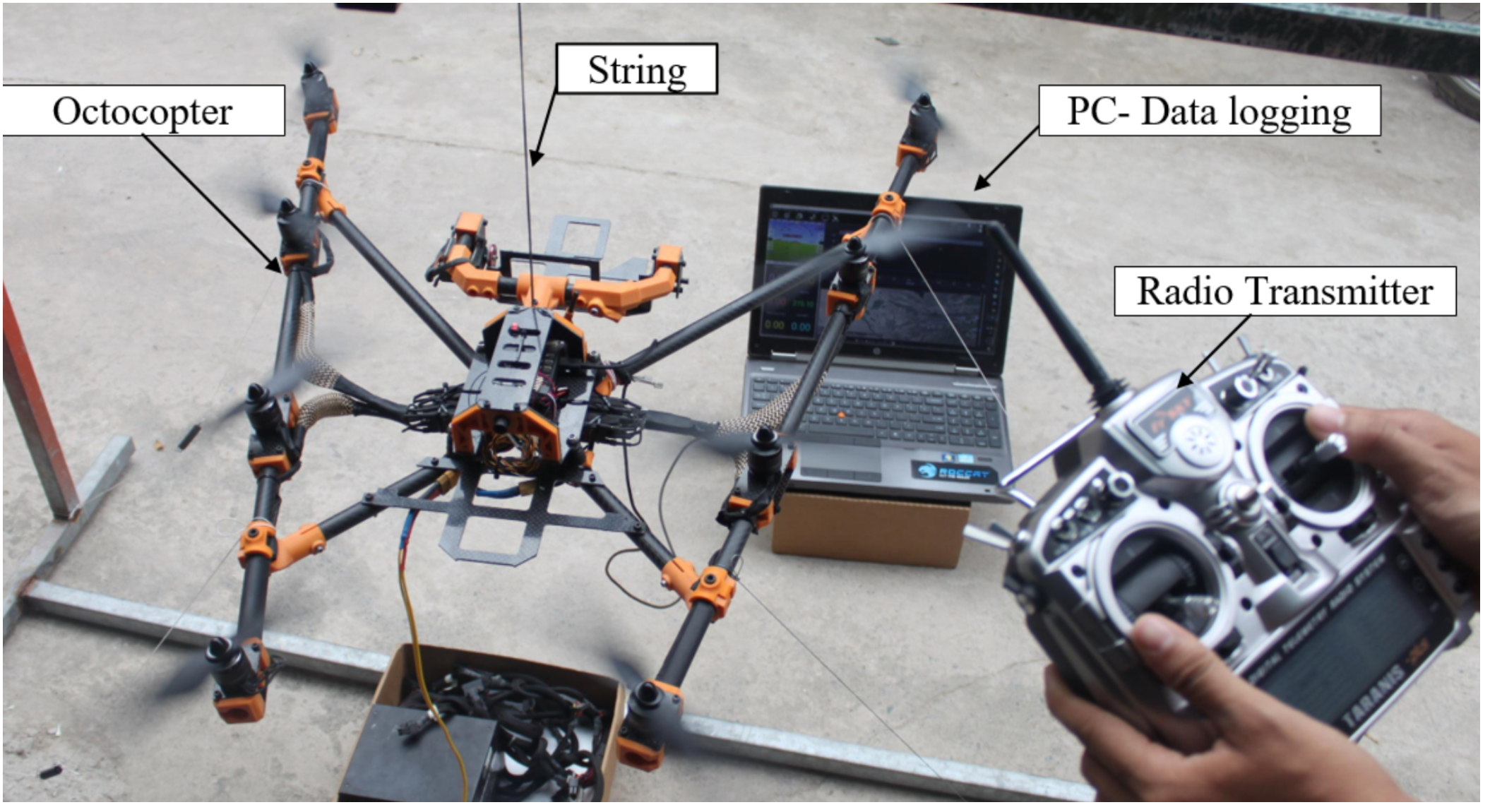
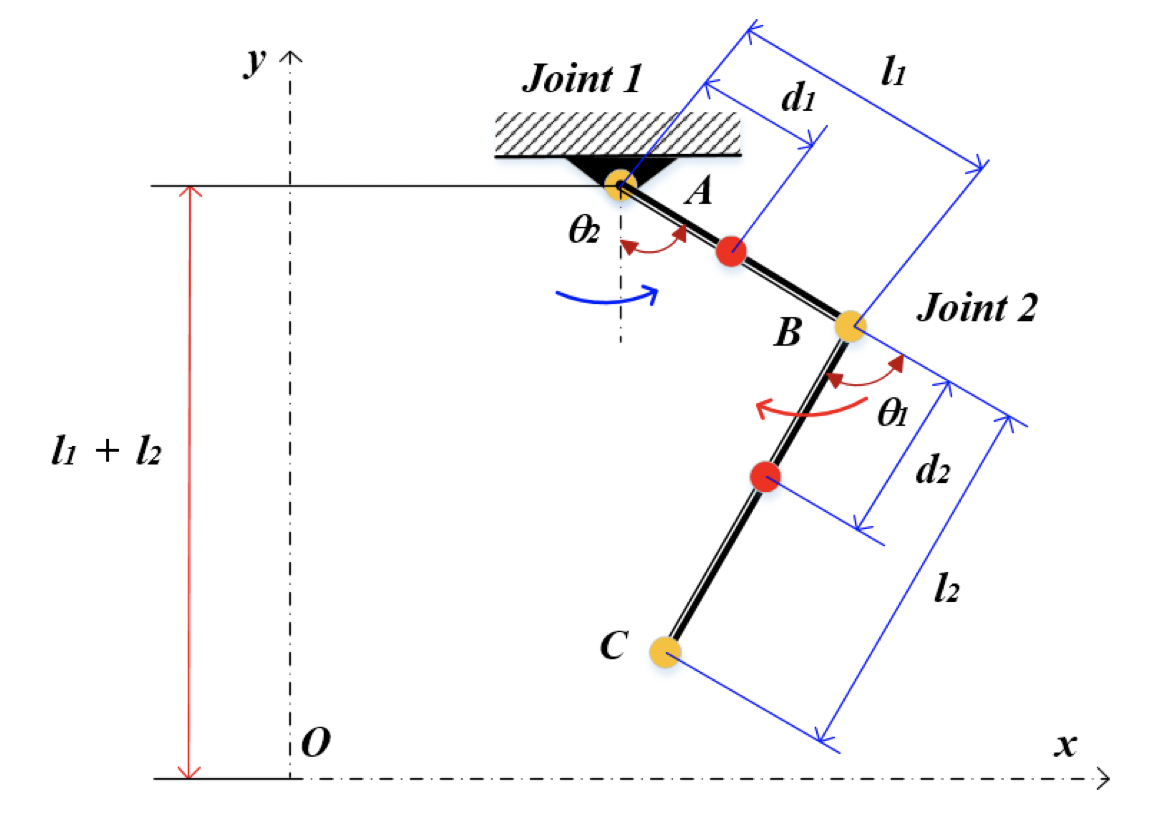
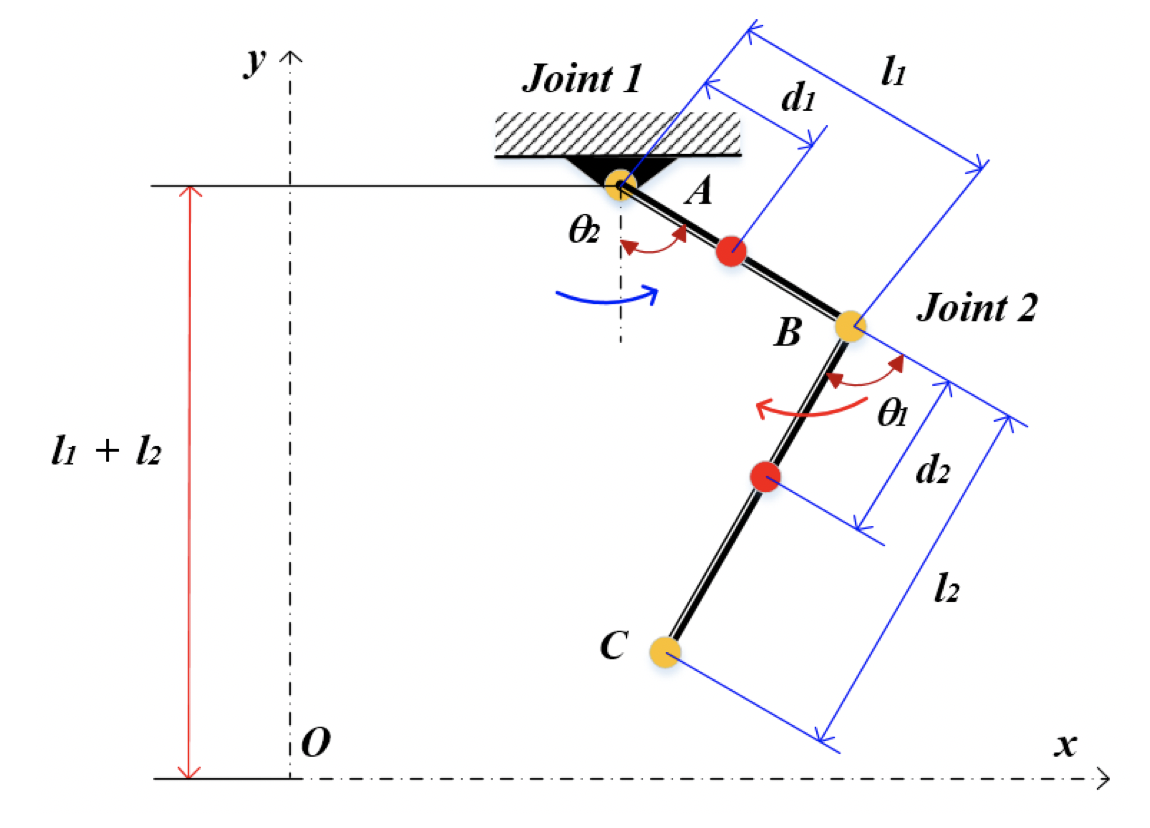
Development of a novel V-frame Octocopter: Design, Kinematic Analysis, and Simulation using PID controllers with Ziegler Nichols tuning method
The study shows the new platform of the V-frame octocopter kinematics analysis, designed on the CAD software, with some important mechanical parts using FEM analysis to find the highest stress and displacement under high load applied, the result of all connecting the joints 3D printing part is completely safe. Mechanical parts were manufactured by using 3D printing technology and CNC milling. Moreover, the study has shown V-frame octocopter simulation based on Simulink using the second method Ziegler- Nichols to find suitable parameters of the PID controller for roll and pitch angle. Using the block simulation is good for implementing and fast checking the new algorithm when building the new platform of the robot.
Video, Preprint.
Adaptive Optimal Control for Upper Exoskeleton following Saturation Function
In this study, a new optimal control based on saturation function for the upper exoskeleton is presented. The saturation model is an advanced model including signum function property, which is symbolized by the sliding mode model. Input control of the system is then designed following the saturation model. The gain of the input control is obtained following adaptation law related to the dynamic parameter of the system. After formulating, the control is simulated for evaluation. The random movement of the upper exoskeleton is applied in the simulation, and the tracking performance is used for the proposed controller. The simulation results show that the proposed control is good performance and can be applied in the real system.
Robotics Project
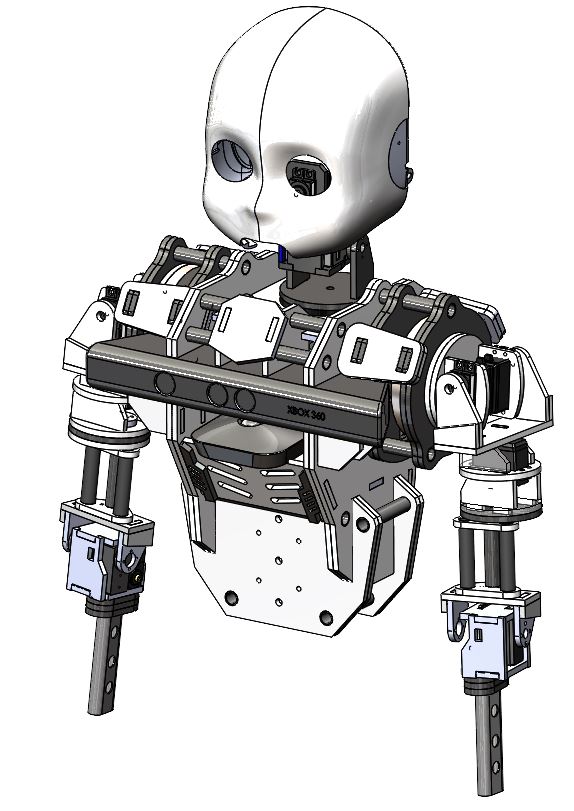
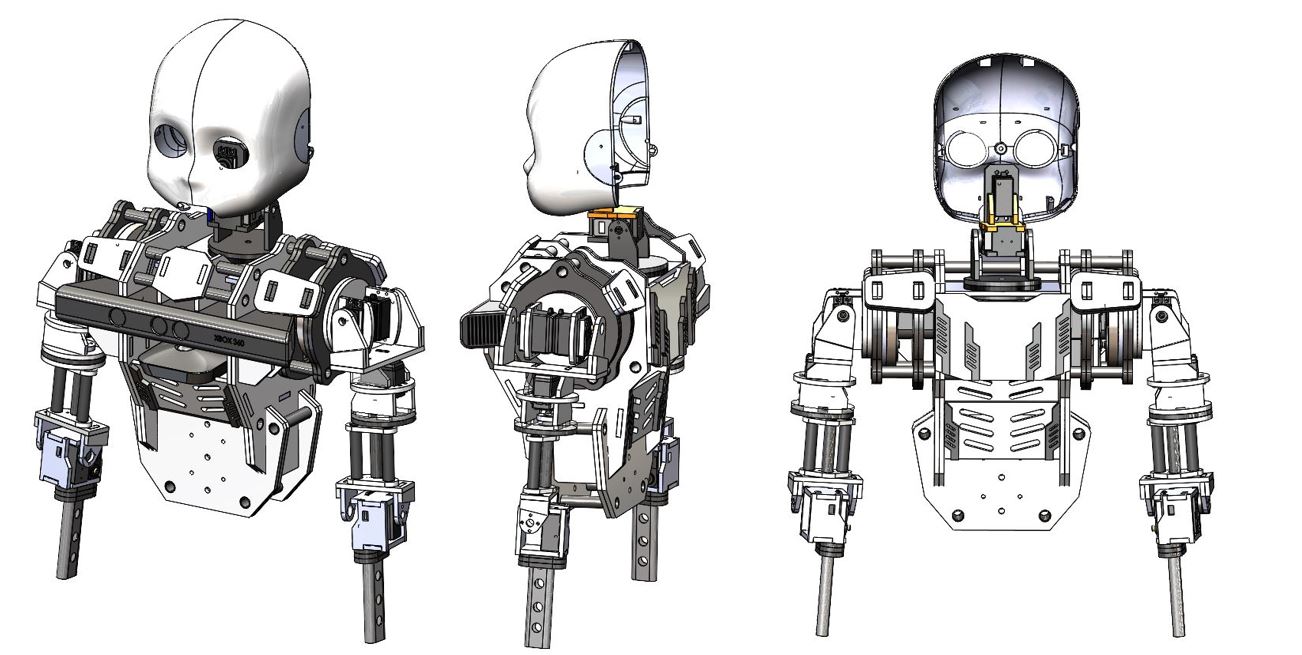
Upper body humanoid robot design
The Upper body Humanoid robot includes 14DOF (Head 6-DOF and 2x Hand 4-DOF), which integrated 3D depth camera. This model can manufacture by 3D printer or laser cutter method. This robot designed for research and educational purposes.
3D File

Autonomous Service Robot
This autonomous service robot can be used in restaurants, hotels, hospitals, and industry. The robot is implemented using ROS Middleware, 2D Lidar, an Embedded computer, and various sensors. The robot can perform SLAM and Autonomous Navigation.
Video

Docking and Locking for Electric bike in BOSCH Station
This design includes the charger docking and locking mechanism for the electric motorbike in "Bosch Green Challenge project", I got awarded "Certification of Innovation Activities and Development" for this design.
3D File
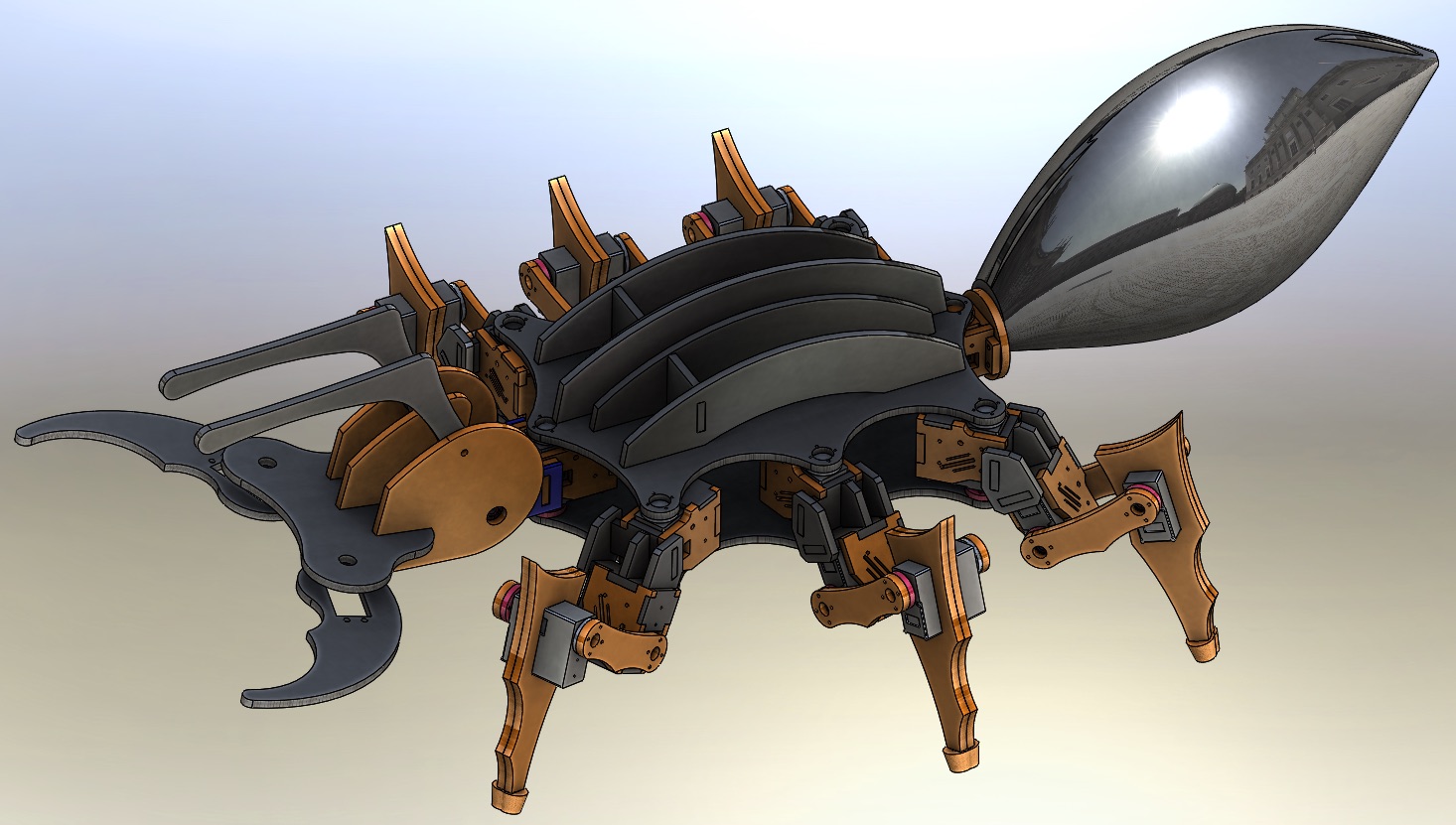
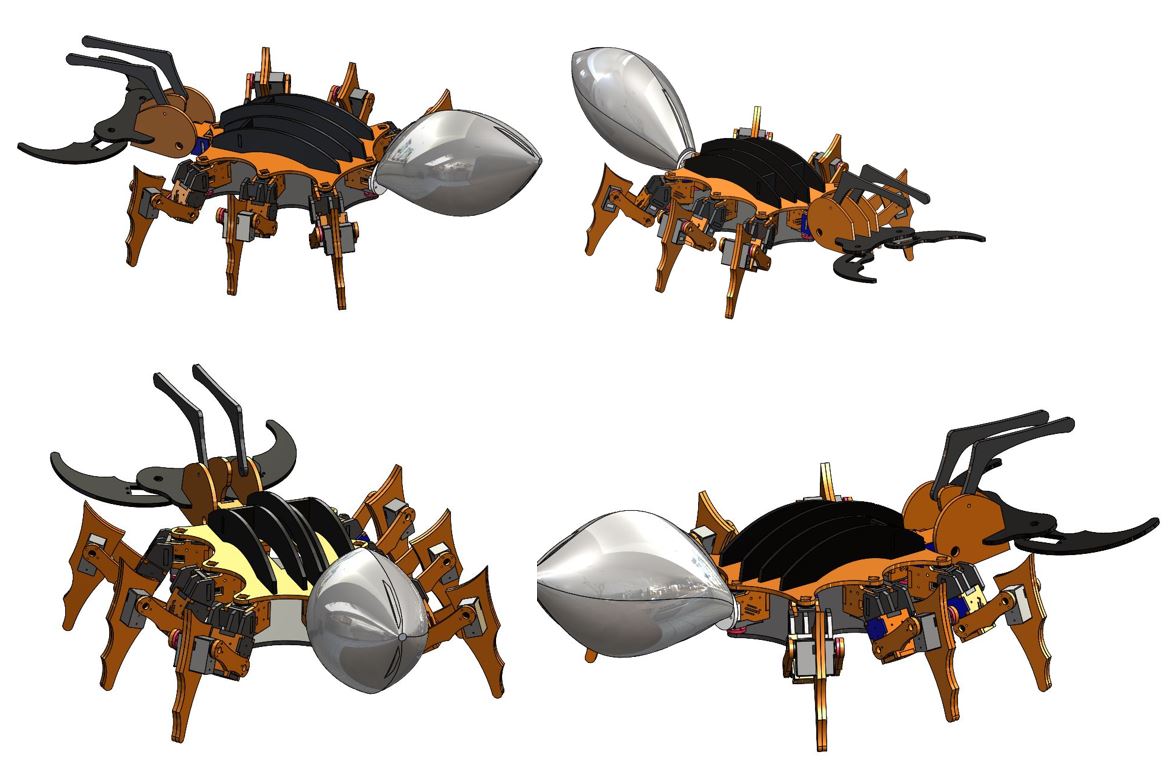
Ant-like robot
The robot has 23-DOF and each leg has been designed with 3 DOF. Thus, a total of 18 motors a required for walking and operating an Ant-like robot. I used a servomotor actuator and plastic frame for the leg mechanism, the robot was used for STEM teaching.
3D File

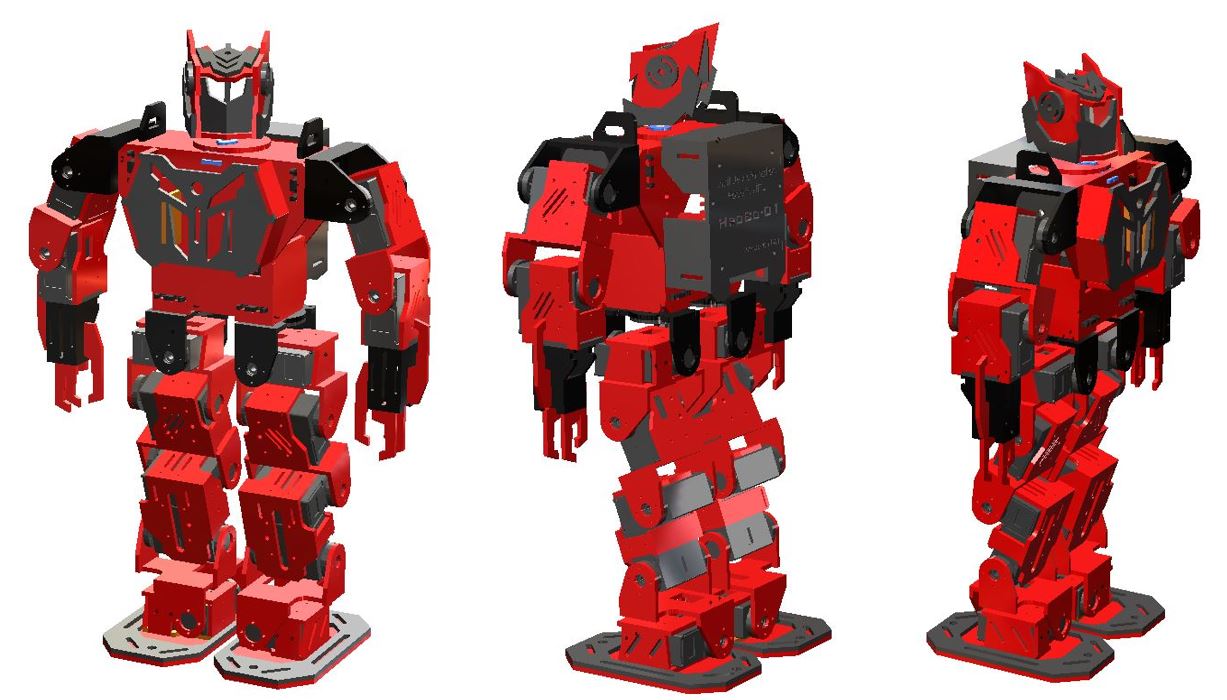
RC Humanoid Robot with 19-DOF
Humanoid robot with 19 DOF for STEM teaching, This model can manufacture by 3D printer or laser cutter method.
3D File ,
Video
Lab Tutorials
- Robotics and Autonomous Systems (ROS, Pytorch)
- Embedded intelligent System (ROS, OpenCV)
- Microcontroller
- Digital Signal Processing
- Robotics Workshop (CAD and PCB Design)
Programming Skills

PCB Design Skills
Hand-on Hardware Experiments
Robot platform: UR10e, Kuka Youbot, Turtlebot 3, NAO, DJI Drone ..
Sensor: Velodyne VLP-16, IMU-Xsens Mti-30, Houkyo Lidar, Intel Realsense, SICK Lidar - Camera,..
Embedded Computer: Nvidia Jetson family, Raspi-Pi, NUC, Arduino..
Actuator: Various of Servo motor, Linear motor, Motor driver,..